随着科技的飞速发展,人工智能已成为自动驾驶技术革命的核心驱动力。自动驾驶系统从环境感知、决策规划到控制执行的每一个环节,都深度依赖人工智能技术,尤其是其基础软件的开发与迭代。本演示将系统性地探讨人工智能在自动驾驶开发中的关键应用,并深入剖析支撑这些应用的基础软件开发框架与挑战。
第一部分:人工智能如何赋能自动驾驶
自动驾驶通常被划分为L0至L5六个等级,其进阶过程本质上是车辆智能化程度的不断提升。人工智能在其中扮演着“大脑”与“感官”的双重角色:
- 环境感知与理解:这是自动驾驶的基石。通过计算机视觉(CV)、激光雷达点云处理、传感器融合等技术,AI算法能够实时识别车辆、行人、交通标志、车道线以及复杂路况。深度学习模型,特别是卷积神经网络(CNN),在图像和点云的目标检测、分割与分类任务上展现出超越传统方法的性能。
- 高精度定位与地图构建:结合GNSS、IMU和视觉/激光SLAM技术,AI算法能够实现厘米级的车辆定位,并实时构建或更新高精度地图,为路径规划提供上下文信息。
- 决策与路径规划:这是自动驾驶的“智慧”所在。基于强化学习、深度强化学习以及博弈论,系统能够在瞬息万变的交通环境中做出拟人化的决策,如超车、并线、路口通行等,并规划出安全、高效、舒适的行驶轨迹。
- 车辆控制:通过深度学习或模型预测控制等算法,将规划好的路径转化为精确的油门、刹车和转向指令,确保车辆平稳、准确地沿轨迹行驶。
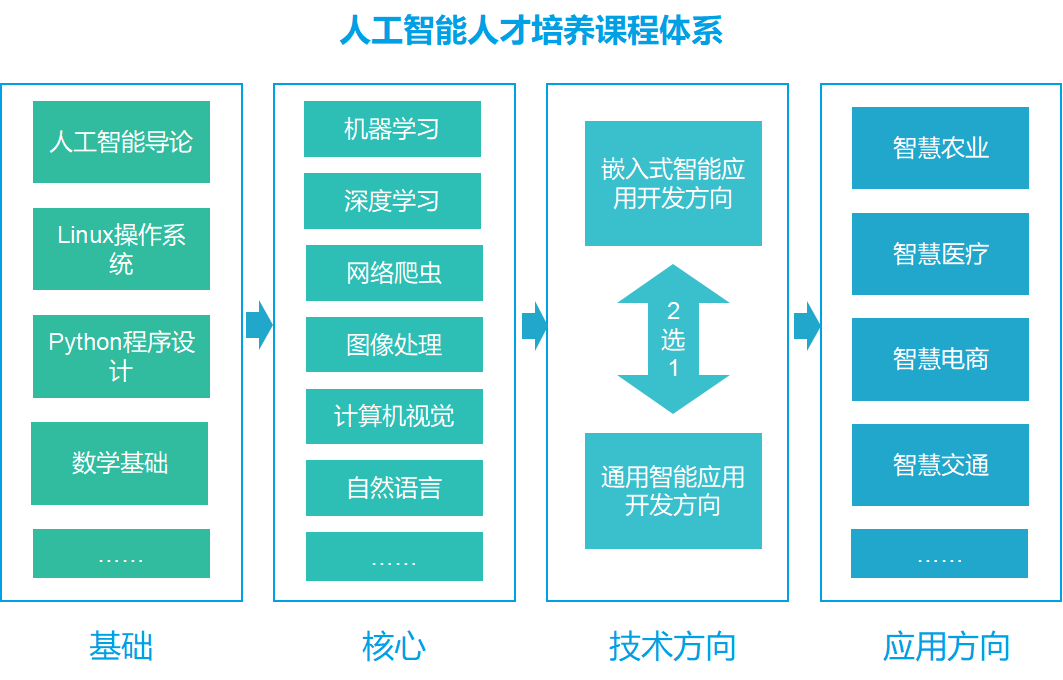
第二部分:自动驾驶人工智能基础软件开发
上述强大应用的背后,是一整套复杂、可靠且高效的基础软件栈。其开发是系统工程,核心层面包括:
- 数据驱动开发管道:
- 数据采集与标注:自动驾驶需要海量、多样化的真实世界和仿真数据。开发高效的数据采集平台和(半)自动化的数据标注工具链至关重要。
- 模型训练与优化:构建分布式的深度学习训练框架,支持大规模数据集上的模型训练、超参数调优以及模型压缩与量化,以适应车端计算平台的资源限制。
- 仿真与测试:建立高保真的虚拟仿真环境,用于在安全、可控且成本低廉的条件下进行算法测试、极端案例复现和系统验证,这是解决“长尾问题”的关键。
- 核心算法框架与中间件:
- 深度学习框架:如TensorFlow、PyTorch及其车规级优化版本,是模型研发的基石。需要确保其在高性能计算平台上的效率与稳定性。
- 自动驾驶中间件:如ROS 2、AUTOSAR Adaptive等,提供了模块化通信、资源管理和服务发现的功能,是整合感知、规划、控制等不同模块的“神经系统”。
- 实时操作系统:满足功能安全(如ISO 26262 ASIL-D)要求的实时操作系统是确保系统及时可靠响应的保障。
- 车载计算平台与部署:
- 硬件加速:针对AI计算负载,集成GPU、NPU或专用ASIC等加速芯片,软件栈需提供相应的驱动、推理框架和优化编译器。
- 模型部署与推理引擎:使用TensorRT、OpenVINO等工具将训练好的模型优化并部署到车端硬件,确保推理过程的高效与低延迟。
- OTA升级与生命周期管理:支持通过无线方式对AI模型和软件进行持续更新与迭代,使车辆能够不断学习和改进。
第三部分:挑战与未来展望
尽管进展显著,挑战依然存在:
- 安全性与可靠性:如何确保AI决策在未知场景下的绝对安全,并通过严格的法规认证。
- 长尾问题:处理罕见但危险的极端案例,需要更强大的仿真和合成数据生成能力。
- 计算效率与功耗:在有限的功耗预算下实现更复杂的AI计算。
- 数据隐私与伦理:数据采集、使用的合规性与伦理框架的建立。
人工智能基础软件将向着更加标准化、模块化、开源化的方向发展。端云协同计算将更加成熟,车端的实时响应与云端的深度学习和仿真将无缝结合。因果推理、具身智能等新一代AI技术有望赋予自动驾驶系统更深层的理解与推理能力,最终实现全场景、安全可靠的无人驾驶愿景。
###
人工智能不仅是自动驾驶的功能实现工具,更是其持续进化的核心引擎。而稳健、灵活且高效的基础软件开发,则是将AI潜力转化为安全可靠产品落地的关键工程保障。两者相辅相成,共同驱动着交通出行的深刻变革。